Forces
Overview
Forces is a core chapter in mechanics. It studies how interactions between objects produce changes in motion, deformation, or turning effects.
This topic supports later chapters such as:
This page is the main revision hub for the chapter.
It includes:
- what a force is
- vector nature of force
- 1D signed convention
- common forces
- Hooke’s law overview
- pressure / upthrust / drag overview
- moments / equilibrium overview
- centre of gravity / stability overview
- worked examples
- formula summary
- common exam pitfalls
- related links
Core Ideas
What is a Force?
A force is an interaction that may:
- change speed
- change direction of motion
- produce acceleration
- deform an object
- produce turning effects
The full Newtonian statement is:
where:
- = resultant force
- = mass (scalar)
- = acceleration (vector)
Hence, force is a vector quantity.
Vector Nature of Force
A vector has:
- magnitude
- direction
Examples:
- upward
- to the left
See Vectors.
1D Signed Convention
In one-dimensional motion, force is still a vector, but we often represent it by its signed component along a chosen axis.
Choose rightward as positive:
- means rightward
- means leftward
Then:
is the component form of:
A negative sign means the vector points opposite to the chosen positive direction.
Resultant Force
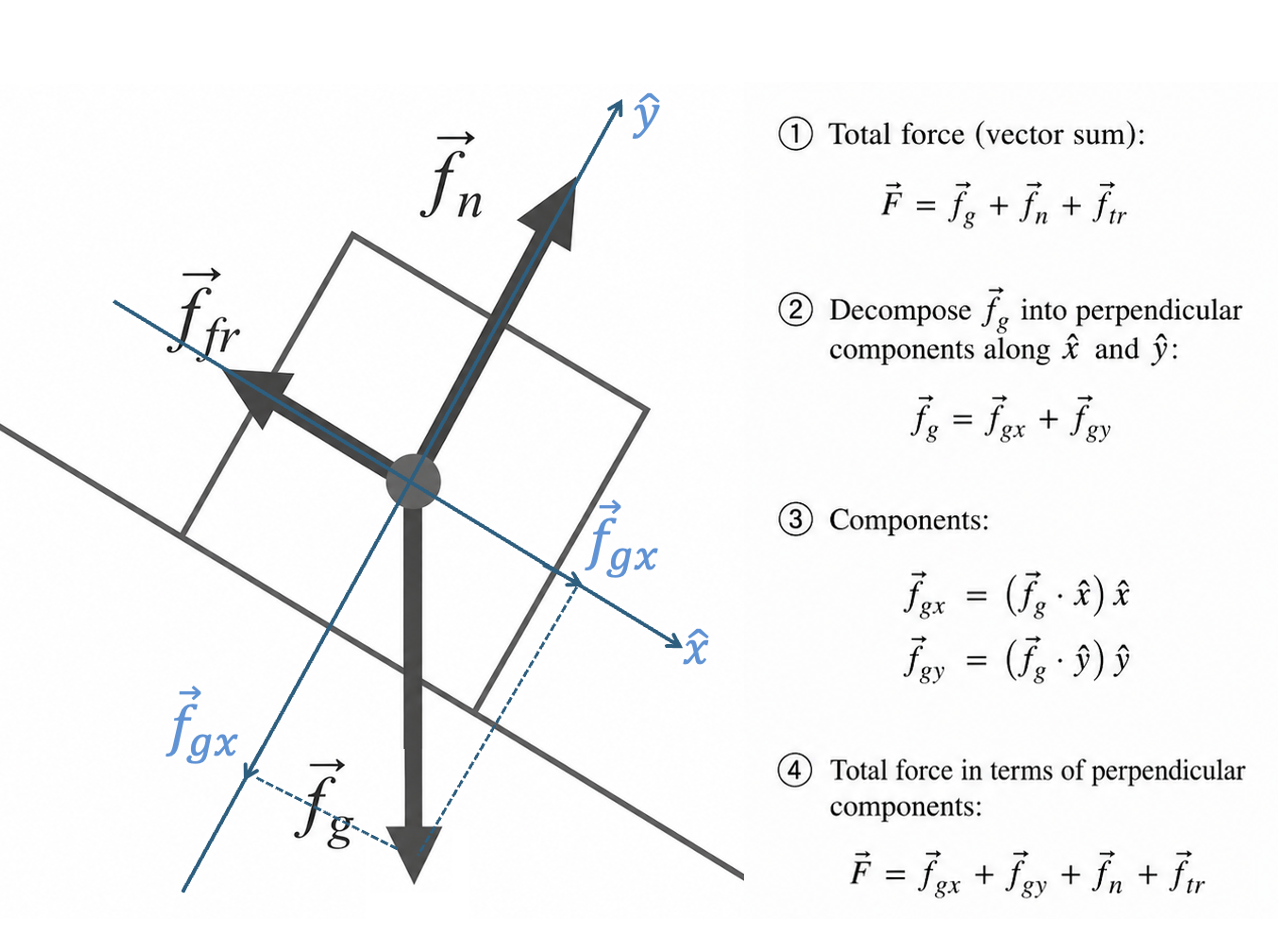
Figure: The resultant force is the single vector equal to the vector sum of all forces acting on the object.
The resultant force is the vector sum of all forces acting on an object.
If resultant force is zero:
then the object has no acceleration by Newton’s second law .
It may be:
- at rest
- moving with constant velocity
Common Forces
Weight

Figure: Weight is the gravitational force on an object and always acts vertically downward.
Weight is the gravitational force on an object.
Magnitude:
Direction: vertically downward. The magnitude of the gravitational field strength, is conventionally denoted by .
Normal and Tangential Contact Forces
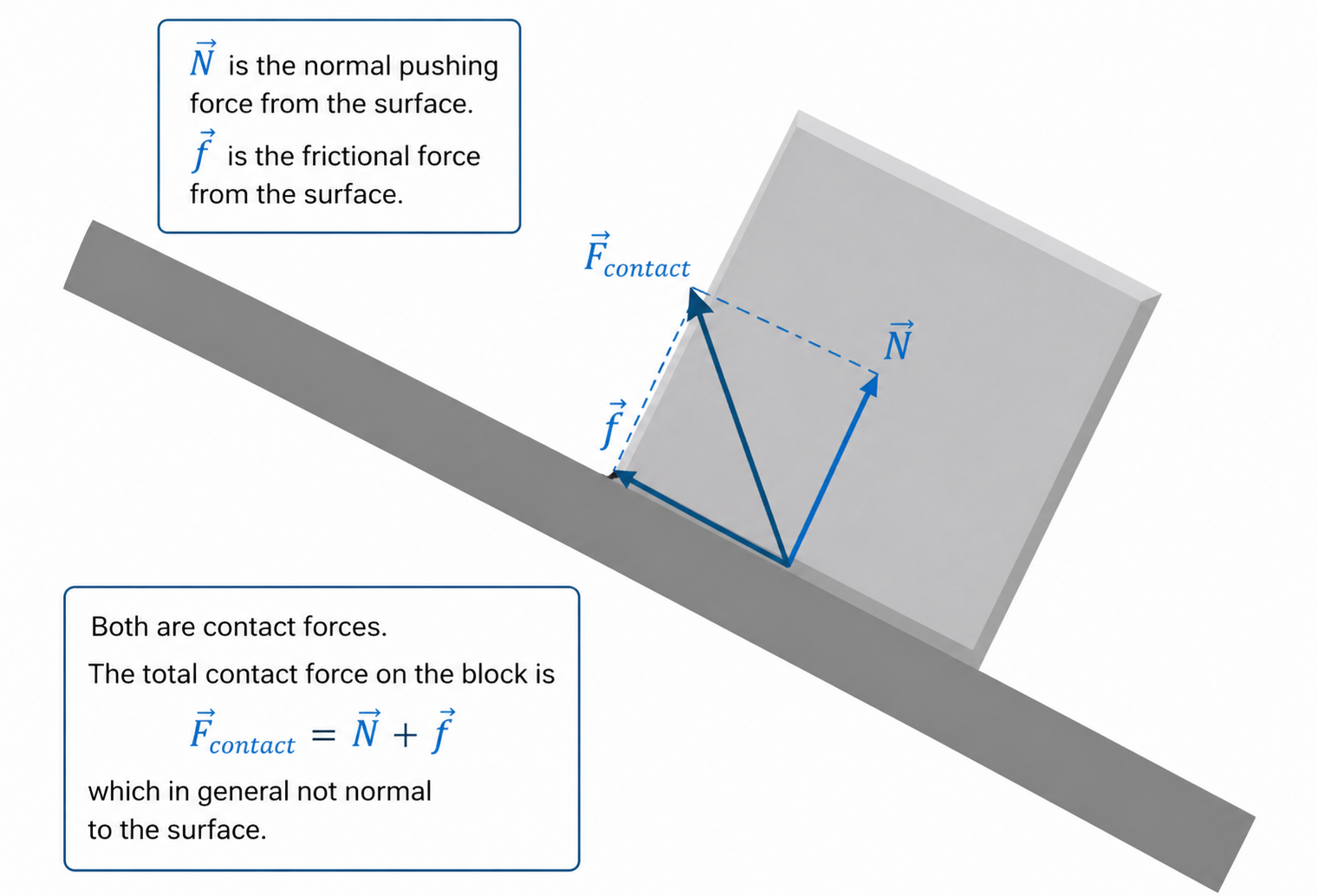
Figure: A contact surface can exert both a normal force perpendicular to the surface and a tangential contact force along the surface.
The forces exerted by a surface on an object.
Symbol: and in the above example.
Direction: perpendicular to the contact surface, and tangential to the contact surface.
Tension and tensile force
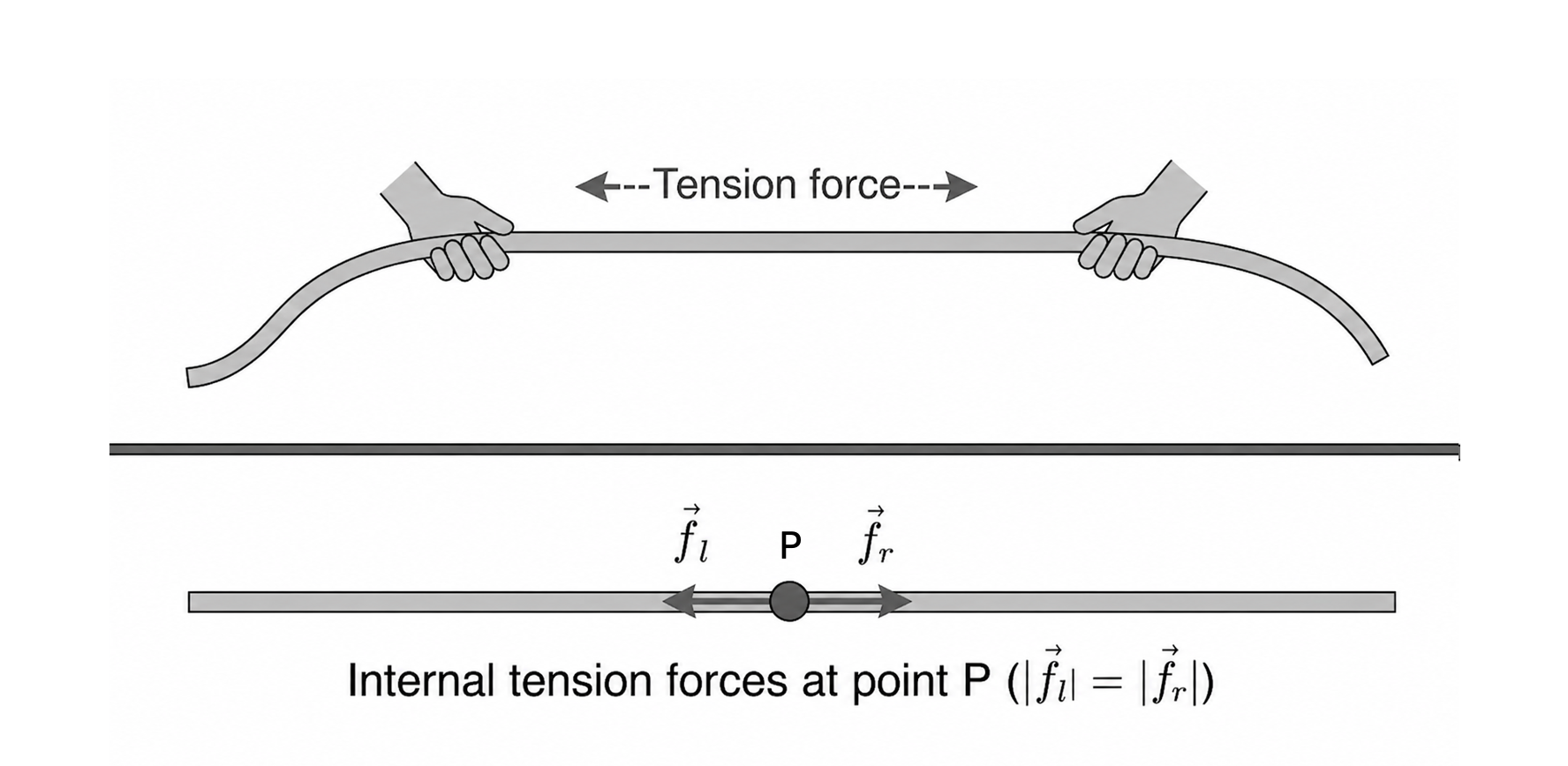
Figure: Tension is the pulling force transmitted through a light taut string or rope, acting along the string.
Force transmitted through a light taut string, rope, or cable. In the above example, a stationary rope is pulled to two opposite directions. At any point on the rope, two tensile forces, and , act on the point, with equal magnitude and opposite direction. Their magnitude, is referred to as “tension”, often denoted with
Symbol:
Direction: along the string, away from the object.
Resistive Force / Drag
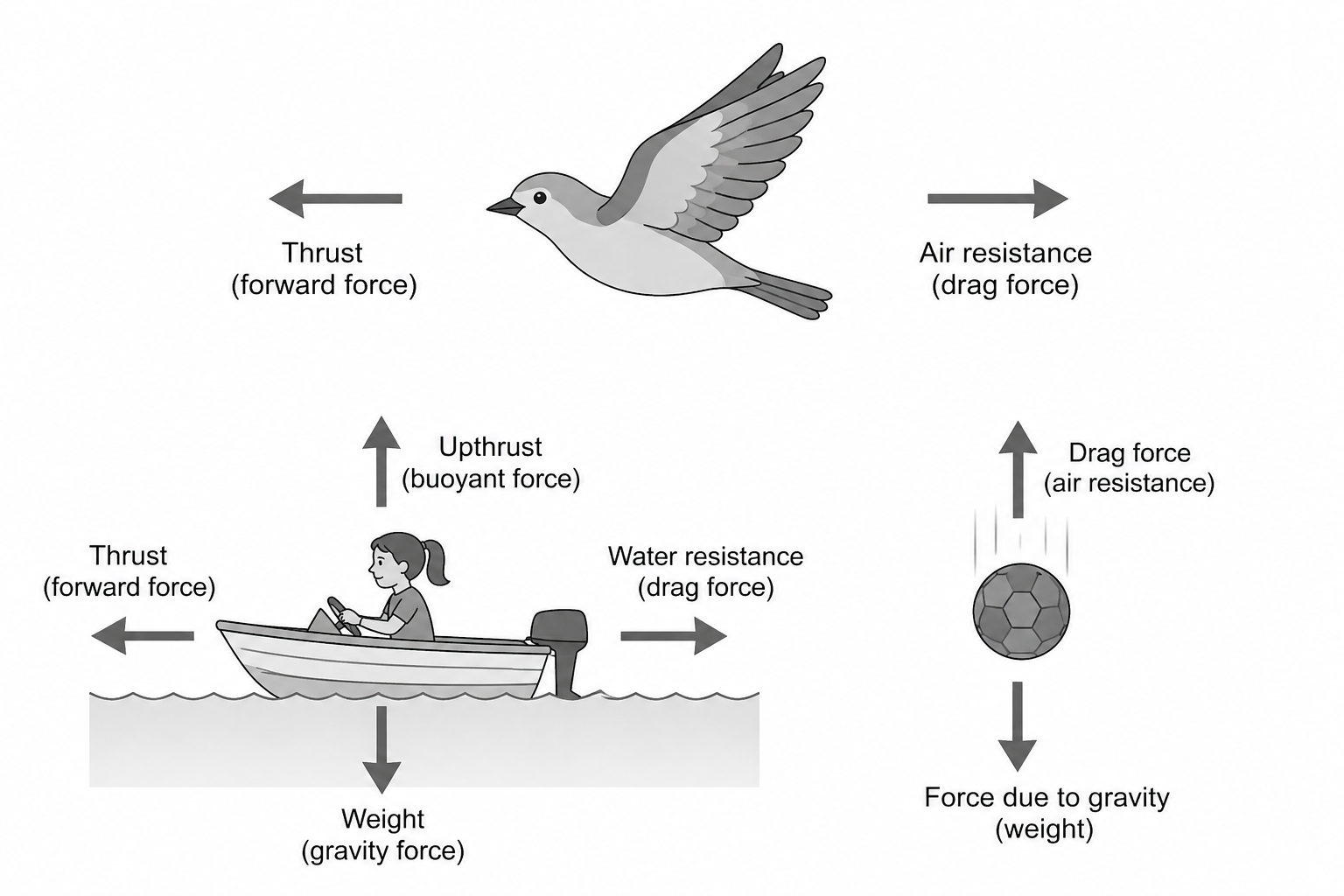
Figure: Resistive forces act opposite to the direction of motion through a fluid such as air or water.
Opposes motion through air or fluid.
Examples:
- air resistance
- water resistance
Direction: opposite to velocity.
Upthrust
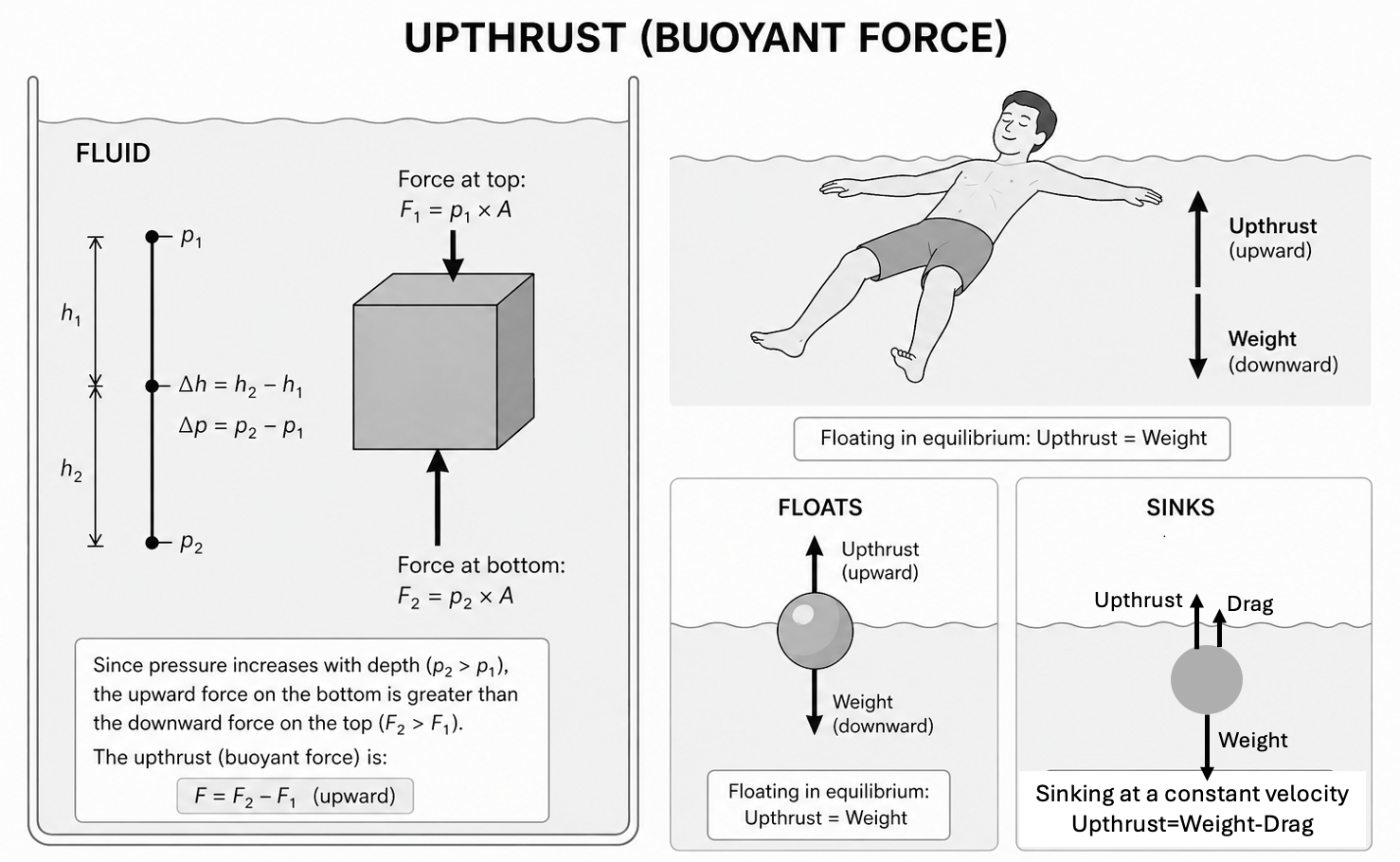
Figure: Upthrust is the upward force exerted by a fluid on a partially or fully immersed object.
Upward force exerted by a fluid on an immersed object. For a floating or suspended object, the upthrust (buoyant force) equals the weight. For an object sinking at a constant velocity, there is an drag force opposite to the motion direction. The upthrust equals weight minus the drag force.
Symbol: , where is the density of the fluid or air, is the volume of the immersed object (i.e., the volume of displaced liquid or air), and is the gravitational field strength.
Elastic / Spring Force
Restoring force from a stretched or compressed elastic object.
For ideal (harmonic) springs:
is the spring constant reflecting the stiffness of the spring. is the displacement from the equilibrium position . The minus sign indicates that the spring force (signed vector) points to the opposite direction of the displacement.
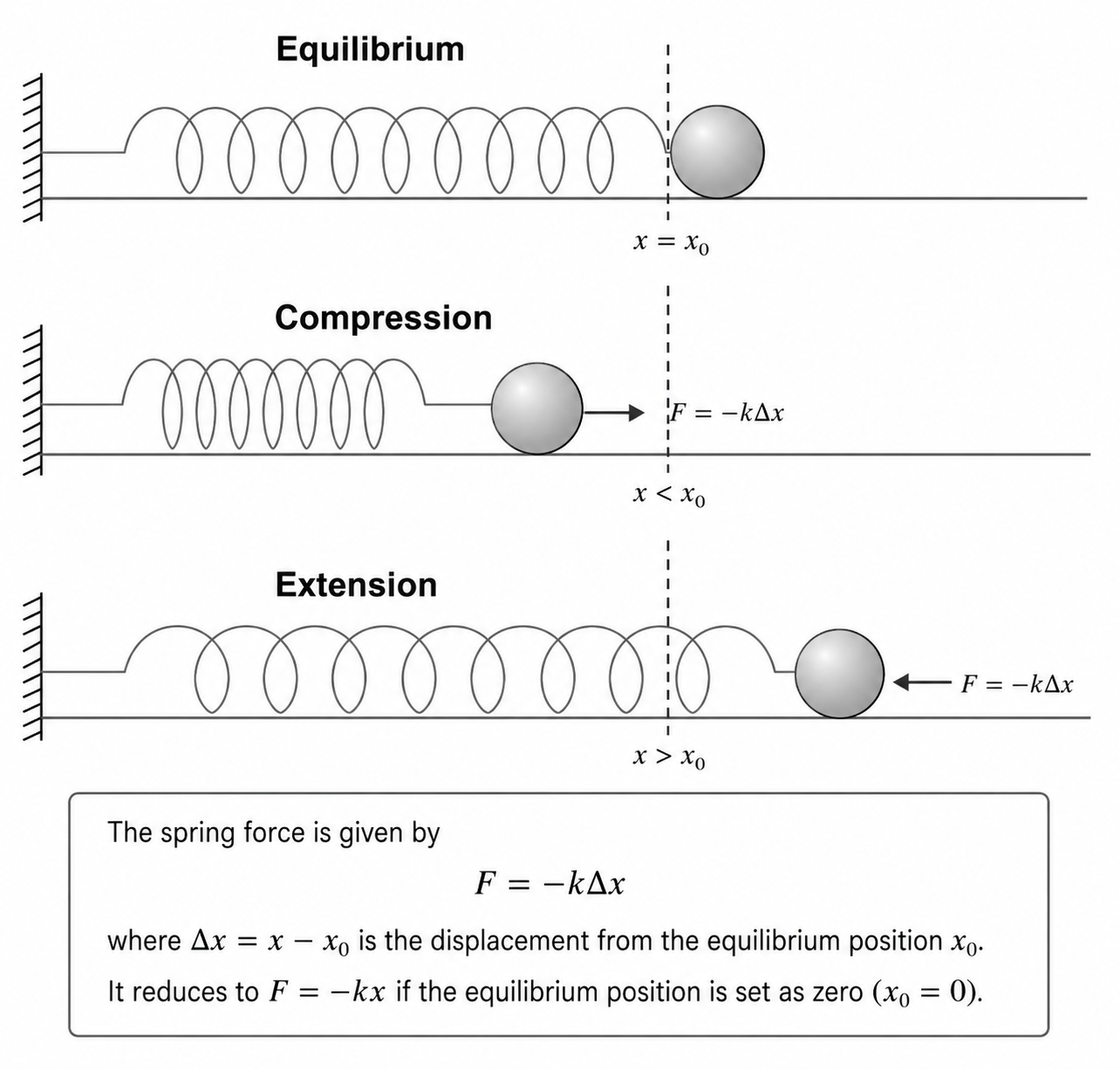
Figure: A spring exerts a restoring force opposite to its extension or compression from equilibrium.
Moments
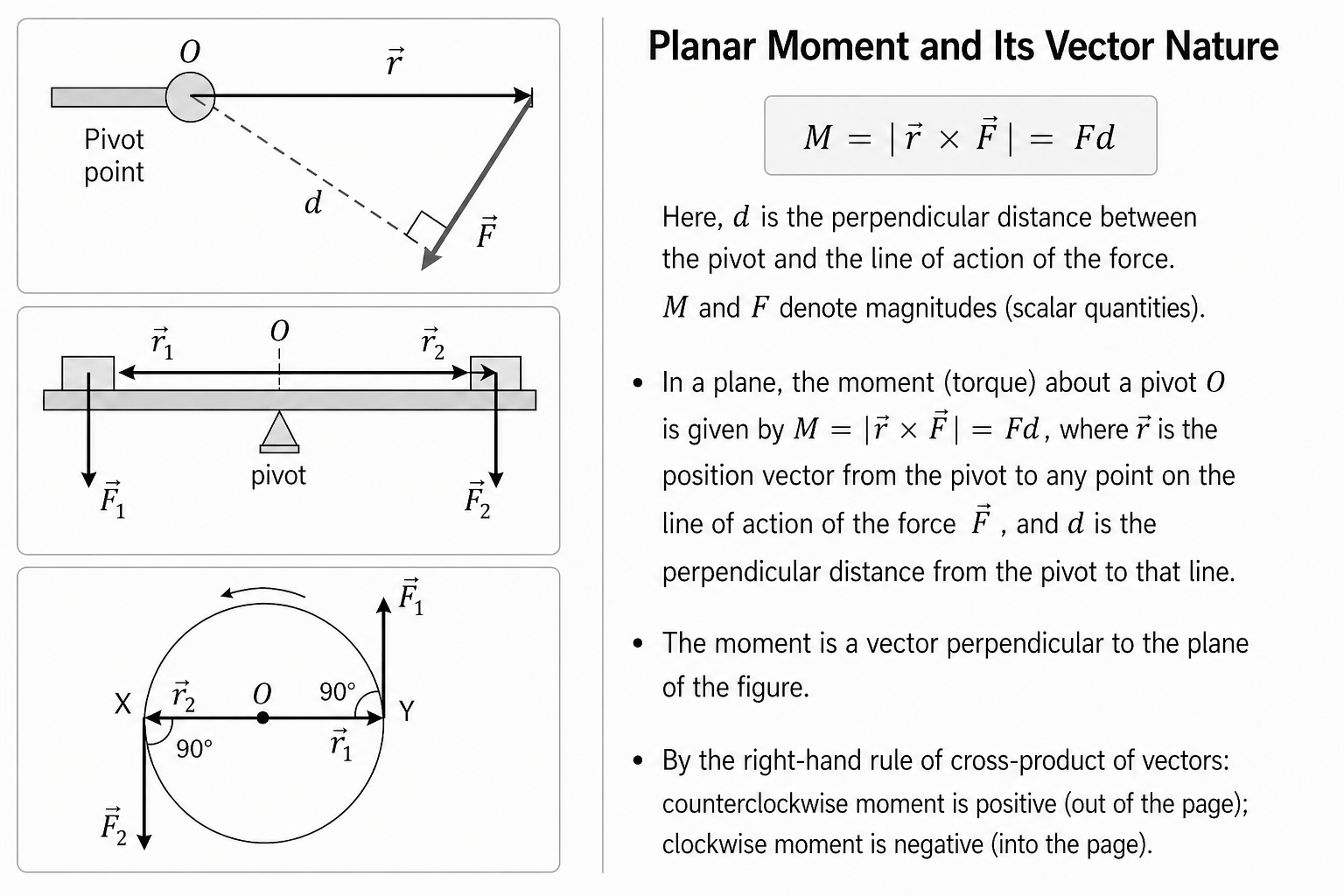
Figure: The moment about a pivot depends on the force and the perpendicular distance from the pivot to the line of action.
Planar Moment (Torque)
The moment (torque) about a pivot point describes the turning effect of a force.
Definition
- : magnitude of the moment (scalar)
- : magnitude of the force
- : position vector from the pivot to a point on the line of action of the force
- : perpendicular distance from the pivot to the line of action of the force
Key Ideas
- The moment depends on both:
- the magnitude of the force, and
- the lever arm (perpendicular distance )
- Only the component of force perpendicular to contributes to the moment.
Vector Nature
- The moment is fundamentally a vector:
- It is perpendicular to the plane containing and .
Direction (Planar Problems)
- Using the right-hand rule of cross-product of vectors:
- Anticlockwise rotation moment out of the page (positive)
- Clockwise rotation moment into the page (negative)
- Hence, the planar moment vector can be expressed by a signed scalar .
Equilibrium Condition
- For rotational equilibrium about a pivot:
i.e., total clockwise moments = total anticlockwise moments.
For a fuller treatment of couples, pivot choice, and rigid-body equilibrium problems, see Equilibrium, Moments, and Couples.
Contact and Non-Contact Forces
Contact Forces
Require physical contact:
- normal force
- tension
- friction
- drag
- upthrust
- spring force
Non-Contact Forces
Act through fields:
- gravitational force
- electric force
- magnetic force
Free-Body Diagram Overview
A free-body diagram (FBD) shows all external forces acting on one chosen object.
Typical steps:
- isolate the object
- draw object as box/dot
- draw all forces from object
- label clearly
See Force Diagrams and Resolution.
Force Resolution Overview
A force at angle may be resolved into perpendicular components.
Horizontal:
Vertical:

An angled force can be resolved into horizontal and vertical components using right-triangle geometry.
Useful when analysing slopes, ropes, beams, and equilibrium.
See Force Diagrams and Resolution.
Hooke’s Law Overview
Within the limit of proportionality:
where:
- = applied force
- = spring constant
- = extension or compression
Force-extension graph is straight line through origin for ideal behaviour.
Elastic potential energy stored:
Related chapter:
Pressure Overview
Pressure is a scalar quantity.
Defined by:
where:
- = normal force on surface
- = area
SI unit: Pa
Hydrostatic Pressure Overview
Pressure due to liquid column:
where:
- = fluid density
- = gravitational field strength
- = depth
Pressure increases with depth.
Upthrust Overview
A submerged object experiences greater pressure below than above, producing net upward force.
For displaced fluid volume :
This is Archimedes’ principle.
See Fluid Forces and Resistive Motion.
Drag and Terminal Velocity Overview
Drag force opposes motion through a fluid.
Usually increases with speed.
When falling:
- weight acts downward
- drag acts upward
- upthrust may act upward
At terminal velocity:
Acceleration becomes zero and speed is constant.
See Fluid Forces and Resistive Motion.
Moments Overview
The turning effect of a force about a pivot.
where:
- = force magnitude
- = perpendicular distance from pivot to line of action
Moment direction is associated with clockwise / anticlockwise turning sense.
See Equilibrium, Moments, and Couples.
Equilibrium Overview
For a rigid body in equilibrium:
Translational Equilibrium
Rotational Equilibrium
So the body has:
- no linear acceleration
- no angular acceleration
Centre of Gravity Overview
The centre of gravity (C.G.) is the point through which weight may be considered to act.
Useful in:
- balance problems
- moments
- stability
Stability Overview
An object is more stable when:
- base is wider
- centre of gravity is lower
Toppling occurs when the line of action of weight falls outside the base.
Conservative Force Bridge
A conservative force does path-independent work.
Examples:
- gravitational force
- ideal spring force
Non-conservative forces:
- friction
- drag
These often dissipate mechanical energy.
Short Worked Examples
Example 1: Resultant Force in 1D
Right positive.
Forces on object:
Mass
Example 2: Spring Extension
Spring constant:
Applied force:
Then:
Example 3: Moment
Force applied from pivot.
Exam Relevance
Force questions test whether you can identify the physical interaction correctly before choosing the right method, such as force balance, resolution, or moments.
Formula Summary
Newton’s Second Law
Weight
Hooke’s Law
The equilibrium position is often set to be zero (), hence .
Elastic Potential Energy (scalar)
Pressure (scalar)
Hydrostatic Pressure (scalar)
Upthrust
Moment (vector)
Here, is the perpendicular distance between the pivot and the line of action of the force.
The moment has a direction, often described as clockwise or anticlockwise.
In planar problems, it is often convenient to treat moment as a signed scalar:
- Choose a convention (e.g., anticlockwise positive).
- Clockwise moments are then negative, and anticlockwise moments are positive.
Common Exam Pitfalls
1. Treating force as scalar always
Force is a vector. Use direction/sign properly.
2. Confusing mass and weight
- mass in kg
- weight in N
3. Wrong trig component
Check angle carefully before using or .
4. Using non-perpendicular distance for moment
Use perpendicular distance to line of action.
5. Forgetting drag direction
Drag always opposes motion relative to fluid.
6. Assuming zero force means zero velocity
Zero resultant force means zero acceleration, not necessarily zero velocity.
7. Forgetting 1D sign convention
Define positive direction first.
Links
Related Links
- Force Diagrams and Resolution
- Fluid Forces and Resistive Motion
- Equilibrium, Moments, and Couples
- Dynamics
- Kinematics
- Vectors
- Work, Energy and Power
Good practice:
- Choose the object or system.
- Draw only forces acting on that object.
- Do not draw forces exerted by the object on something else.
- Do not add “resultant force” or “centripetal force” as an extra force in a free-body diagram.
- Label every force clearly.
- Resolve forces only after the real forces have been identified.
Free-body diagrams are the starting point for later dynamics, equilibrium, circular motion, and field-force problems.
For more detail, see Force Diagrams and Resolution.
Resolving Forces
Forces often need to be resolved into perpendicular components. If a force makes an angle with the chosen -axis:
The component formula depends on where the angle is measured from. The component adjacent to the angle uses cosine; the component opposite the angle uses sine.
When an object is on an inclined plane, axes are often chosen parallel and perpendicular to the plane. This usually simplifies the normal contact force and friction.
Fluid Pressure and Upthrust
Pressure is force per unit area:
The SI unit of pressure is the pascal:
In a fluid at rest, gauge pressure due to depth is:
Total pressure may include atmospheric pressure:
Upthrust is the upward resultant force exerted by a fluid on an immersed object. By Archimedes’ principle, the upthrust equals the weight of fluid displaced:
where is the density of the fluid and is the volume of fluid displaced.
An object floats when its weight is balanced by upthrust. At floating equilibrium:
For more detail, see Fluid Forces and Resistive Motion.
Drag and Terminal Velocity
Drag is a resistive force that acts opposite the relative motion between an object and the fluid around it. It usually increases with speed.
Terminal velocity occurs when the resultant force becomes zero because the driving force is balanced by resistive forces. For a falling object:
- initially, weight is larger than drag, so the object accelerates downward;
- as speed increases, drag increases;
- at terminal velocity, drag plus upthrust balances weight;
- acceleration is then zero, but velocity is not zero.
Moments and Couples
This hub has already introduced the core moment idea above. The main exam reminders are:
- use the perpendicular distance to the line of action;
- keep a consistent clockwise / anticlockwise sign convention in planar problems;
- remember that a couple gives zero resultant force but a non-zero turning effect.
For a couple:
where is the magnitude of either force and is the perpendicular distance between the two force lines of action.
For fuller discussion and worked rigid-body equilibrium problems, see Equilibrium, Moments, and Couples. For the cross-product vector form, see Vectors.
Static Equilibrium
For an object to be in static equilibrium, both translational and rotational equilibrium must hold:
The first condition means there is no resultant force. The second condition means there is no resultant moment about any point.
Useful strategy:
- Draw a free-body diagram.
- Choose convenient axes.
- Resolve forces if needed.
- Write force-balance equations.
- Take moments about a pivot that removes one or more unknown forces.
For extended bodies, the weight is usually treated as acting through the centre of gravity. The line of action of this weight is central to stability and toppling analysis; see Centre of Gravity and Stability.
Conservative and Non-Conservative Forces
Some forces can be linked to potential energy. Gravitational, elastic, and electrostatic forces are common conservative forces. Work done by a conservative force can be stored or recovered as potential energy.
Friction and drag are non-conservative forces. They dissipate mechanical energy, usually as thermal energy.
This distinction becomes important in Work, Energy and Power.
For more detail, see Potential Energy and Conservative Forces.
Learning Path
Use these deeper notes when more detail is needed:
- Force Types and Interactions
- Force Diagrams and Resolution
- Elastic Forces and Hooke’s Law
- Fluid Forces and Resistive Motion
- Equilibrium, Moments, and Couples
- Centre of Gravity and Stability
- Potential Energy and Conservative Forces
Exam Relevance
Drawing accurate free-body diagrams is the most critical first step in solving force problems. Students must master calculating moments using the perpendicular distance and strategically choosing pivot points to simplify calculations. Applying both translational and rotational equilibrium conditions correctly is essential for solving problems involving multiple unknown forces or moments. Vector resolution skills are frequently tested.
Common exam traps include:
- drawing action-reaction pairs on the same free-body diagram;
- adding “centripetal force” as an extra force instead of identifying the real inward forces;
- forgetting that normal contact force is perpendicular to the surface;
- assuming friction always acts opposite the object’s motion rather than opposite relative motion or tendency of relative motion at the contact surface;
- using the distance to the pivot instead of the perpendicular distance for moments;
- applying only and forgetting for rigid-body equilibrium;
- confusing pressure with force;
- thinking terminal velocity means the object has stopped.
Links
- Prerequisite: kinematics
- Prerequisite: measurement
- Related: dynamics
- Related: work energy and power
- Related: circular motion
- Related: simple harmonic motion
- Related: oscillations
- Related: vectors
- Related: centre of gravity and stability
- Related: electric fields
- Related: force types and interactions
- Related: force diagrams and resolution
- Related: elastic forces and hookes law
- Related: fluid forces and resistive motion
- Related: equilibrium moments and couples
- Related: potential energy and conservative forces
Provenance
- source file: 1_PDFsam_03_Forces.pdf
- generated by:
bridging_tools/ingest_JC_phy_wiki.py - manifest entry:
inbox/lecture_notes/1_PDFsam_03_Forces.pdf - source hash:
671bbdecd3ce882a5447a54db5a6b7b0f9dd6c3ec14ff801b31e23795a154df9