Oscillations and Simple Harmonic Motion
Overview
Oscillations describe motion that repeats about an equilibrium position. Many physical systems oscillate when displaced from equilibrium and released, because a restoring force tends to bring the system back while inertia carries it past equilibrium.
Common examples include spring-mass systems, pendulums, vibrating strings, tuning forks, vehicle suspensions, and electrical oscillators.
This hub is the canonical topic page for oscillations and SHM. It is intentionally self-sufficient; the linked pages only expand areas that often need separate treatment.
Core Ideas
- Oscillatory motion is periodic motion about an equilibrium position.
- A restoring force acts toward the equilibrium position.
- In ideal free oscillation, total mechanical energy remains constant.
- In real systems, dissipative forces such as friction and air resistance cause damping.
- If a periodic external driving force acts on a system, forced oscillations may occur.
- Resonance occurs when the driving frequency equals or is close to the natural frequency, producing a maximum response amplitude.
Describing Oscillations
The equilibrium position is the position where the resultant force on the object is zero:
In many JC SHM problems, the motion is treated in one dimension after choosing a positive direction. The displacement , velocity , and acceleration are then signed components of the underlying displacement, velocity, and acceleration vectors along that chosen line. The sign represent the direction.
The signed displacement is measured from equilibrium:
- : one side of equilibrium that is chosen as positive direction;
- : opposite side.
Amplitude is the maximum magnitude of displacement:
The period is the time for one complete oscillation. The frequency is the number of oscillations per second:
Angular frequency is the scalar rate of phase change:
Phase describes the stage of motion within a periodic cycle.
For any periodic motion or wave with period , a time lag corresponds to a phase difference:
Since one complete cycle corresponds to a phase change of radians over a time interval ,
which leads to the above equation.
Special cases:
- in phase: ;
- antiphase: .
See Phase Difference.
Free Oscillations
A free oscillation occurs when a system is displaced and released, then oscillates under its own restoring force without external driving.
Ideal free oscillations have:
- constant amplitude;
- constant period;
- constant total mechanical energy.
Real systems gradually lose energy due to damping.
Simple Harmonic Motion
Simple harmonic motion is oscillatory motion in which acceleration is directly proportional to displacement from equilibrium and always directed toward equilibrium.
Vector form:
In the usual one-dimensional signed-component treatment:
The negative sign means acceleration is opposite to displacement:
- if , then ;
- if , then .
Equations of SHM
The displacement can be written as:
or equivalently:
depending on initial condition. Here, is the time-varying phase, and is the initial phase.
Different values of the initial phase give the same SHM shape but different starting positions on the displacement-time graph. See Simple Harmonic Motion for worked phase-constant examples.
 The normalized displacement curves for $\phi_0=0$, $\phi_0=\pi/2$, and $\phi_0=\pi/4$ show how the initial phase shifts the motion along the time axis without changing amplitude or period.
The normalized displacement curves for $\phi_0=0$, $\phi_0=\pi/2$, and $\phi_0=\pi/4$ show how the initial phase shifts the motion along the time axis without changing amplitude or period.
Velocity is:
Here is the signed velocity component. The speed is .
If displacement is written as:
then differentiating once gives velocity:
and differentiating again gives acceleration:
Comparing (1) and (3), we have:
The maximum acceleration magnitude is:
So the sinusoidal displacement form and the SHM condition are consistent with each other: sinusoidal motion gives restoring acceleration proportional to displacement and directed toward equilibrium.
Displacement, velocity, and acceleration in SHM have fixed phase relationships.
 For $\phi=0$, the normalized curves make the phase relations clear: $v/(x_0\omega)$ leads $x/x_0$ by $\pi/2$, while $a/(x_0\omega^2)$ is in antiphase with $x/x_0$.
For $\phi=0$, the normalized curves make the phase relations clear: $v/(x_0\omega)$ leads $x/x_0$ by $\pi/2$, while $a/(x_0\omega^2)$ is in antiphase with $x/x_0$.
From (1) and (2) and considering , we have:
Alternatively,
Clearly, these equations are mathematically linked, not separate facts.
Graphical Behaviour in SHM
The displacement-time graph is sinusoidal. It has maximum slope at equilibrium and zero slope at turning points.
The velocity-time graph is also sinusoidal and phase shifted by from displacement, so velocity leads displacement by . Velocity is maximum at equilibrium and zero at extremes.
The acceleration-time graph is sinusoidal and in antiphase with displacement.
The acceleration-displacement graph is a straight line:
with gradient:
This is a common test for SHM. Its range is:
 The $x$-$a$ graph for SHM is a straight line with negative gradient.
The $x$-$a$ graph for SHM is a straight line with negative gradient.
The velocity-displacement graph is an ellipse because:
Its range is:
 The $x$-$v$ graph for SHM is an ellipse bounded by $x=\pm x_0$ and $v=\pm \omega x_0$.
## Energy in SHM
The $x$-$v$ graph for SHM is an ellipse bounded by $x=\pm x_0$ and $v=\pm \omega x_0$.
## Energy in SHM
In ideal SHM, total mechanical energy remains constant.
Kinetic energy is:
Using the SHM velocity-displacement relation (5b):
The associated potential energy is:
A brief derivation of (7):
where is the restoring force exerted by the system.
To displace the oscillator slowly from equilibrium to displacement , an external force equal and opposite to the restoring force must be applied:
Hence the potential energy stored is the work done by the external force:
Total energy is:
Equation (6b),
has a clear physical meaning:
That is, the kinetic energy at displacement is the remaining part of the constant total energy after the potential energy has been stored.
At equilibrium , kinetic energy is maximum and potential energy is minimum. At extremes , kinetic energy is zero and potential energy is maximum.
 In ideal SHM, energy transfers between kinetic and potential forms while total energy stays constant.
In ideal SHM, energy transfers between kinetic and potential forms while total energy stays constant.
Spring-Mass System
For a horizontal spring:
Using Newton’s second law:
Thus:
Comparing with :
Hence:
This is the cleanest standard SHM example. The key reason it works is that the spring force is a restoring force proportional to displacement from equilibrium. If the mass is pulled to the right, the spring pulls left; if the mass is pushed to the left, the spring pushes right. That is exactly the sign pattern built into:
and therefore:
So a Hooke’s-law spring implies SHM directly, provided the spring behaves linearly.
Why A Restoring Force Implies SHM
In one-dimensional motion, SHM occurs when the resultant force can be written in the form:
where is the signed displacement from equilibrium.
Then Newton’s second law gives:
so:
This has exactly the SHM form:
with:
The negative sign matters physically: it means the force and acceleration always point back toward equilibrium. The proportionality matters mathematically: doubling the displacement doubles the restoring acceleration magnitude.
Realistic SHM Models
Several familiar systems become SHM models when the restoring effect is proportional to displacement from equilibrium.
Horizontal Spring-Mass System
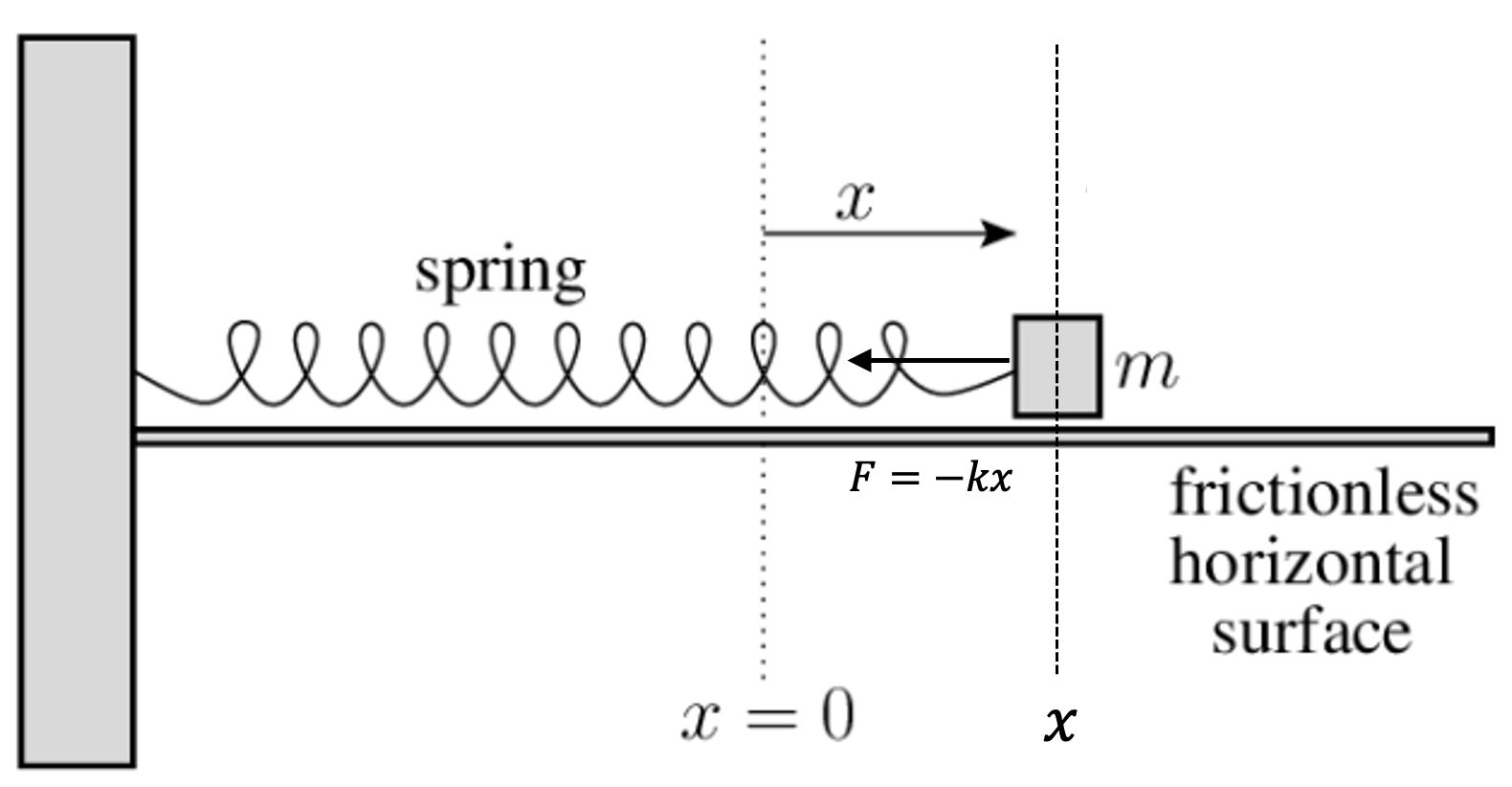 The horizontal spring-mass system is the standard SHM model with restoring force proportional to displacement.
The horizontal spring-mass system is the standard SHM model with restoring force proportional to displacement.
This is the standard case above. The restoring force is the spring force itself:
so the motion is SHM.
Vertical Spring-Mass System
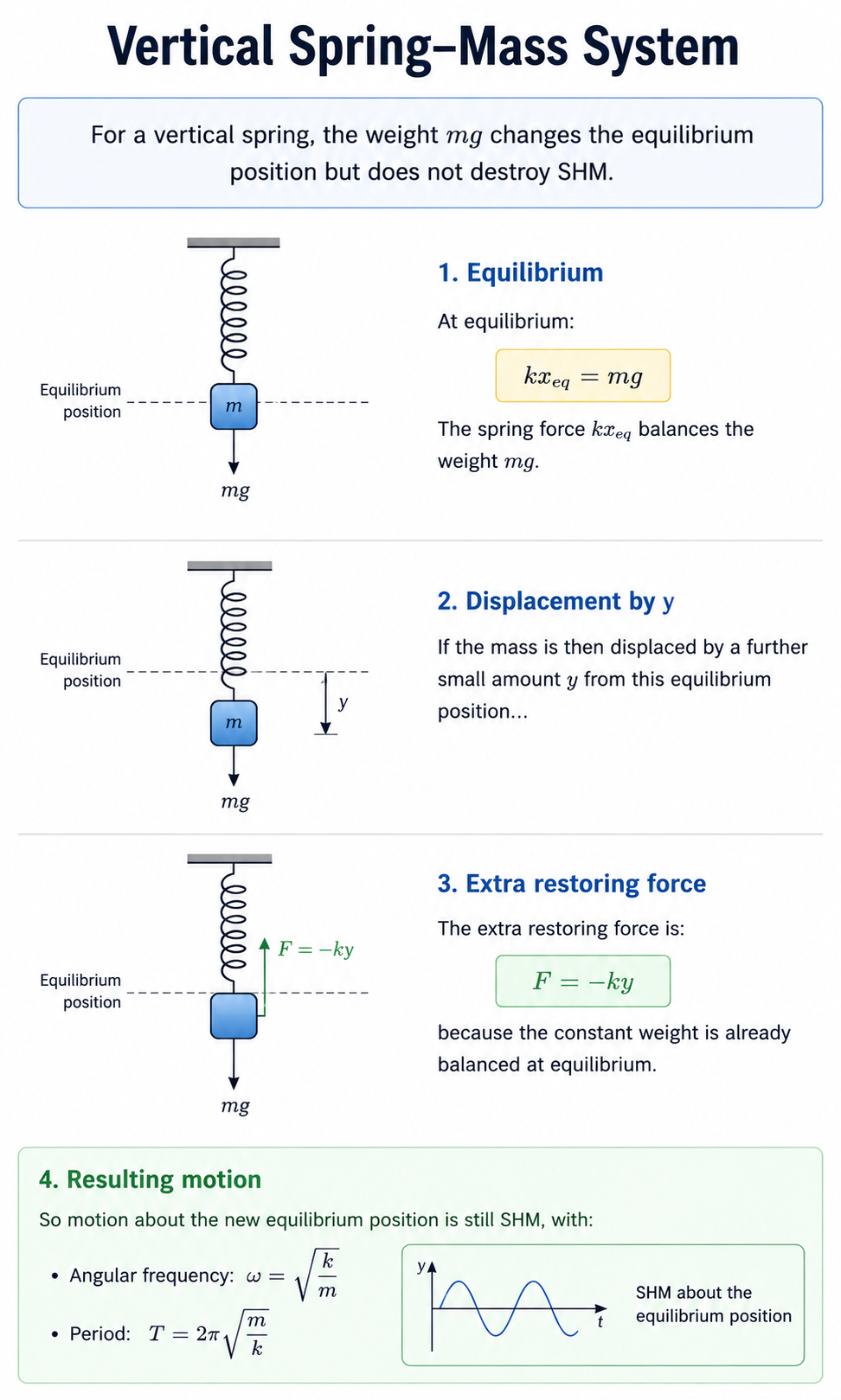 The weight shifts the equilibrium position, but oscillation about the new equilibrium is still SHM.
The weight shifts the equilibrium position, but oscillation about the new equilibrium is still SHM.
For a vertical spring, the weight changes the equilibrium position but does not destroy SHM. At equilibrium:
If the mass is then displaced by a further small amount from this equilibrium position, the extra restoring force is:
because the constant weight is already balanced at equilibrium. So motion about the new equilibrium position is still SHM, with:
and the same period:
Pendulum At Small Angular Displacement
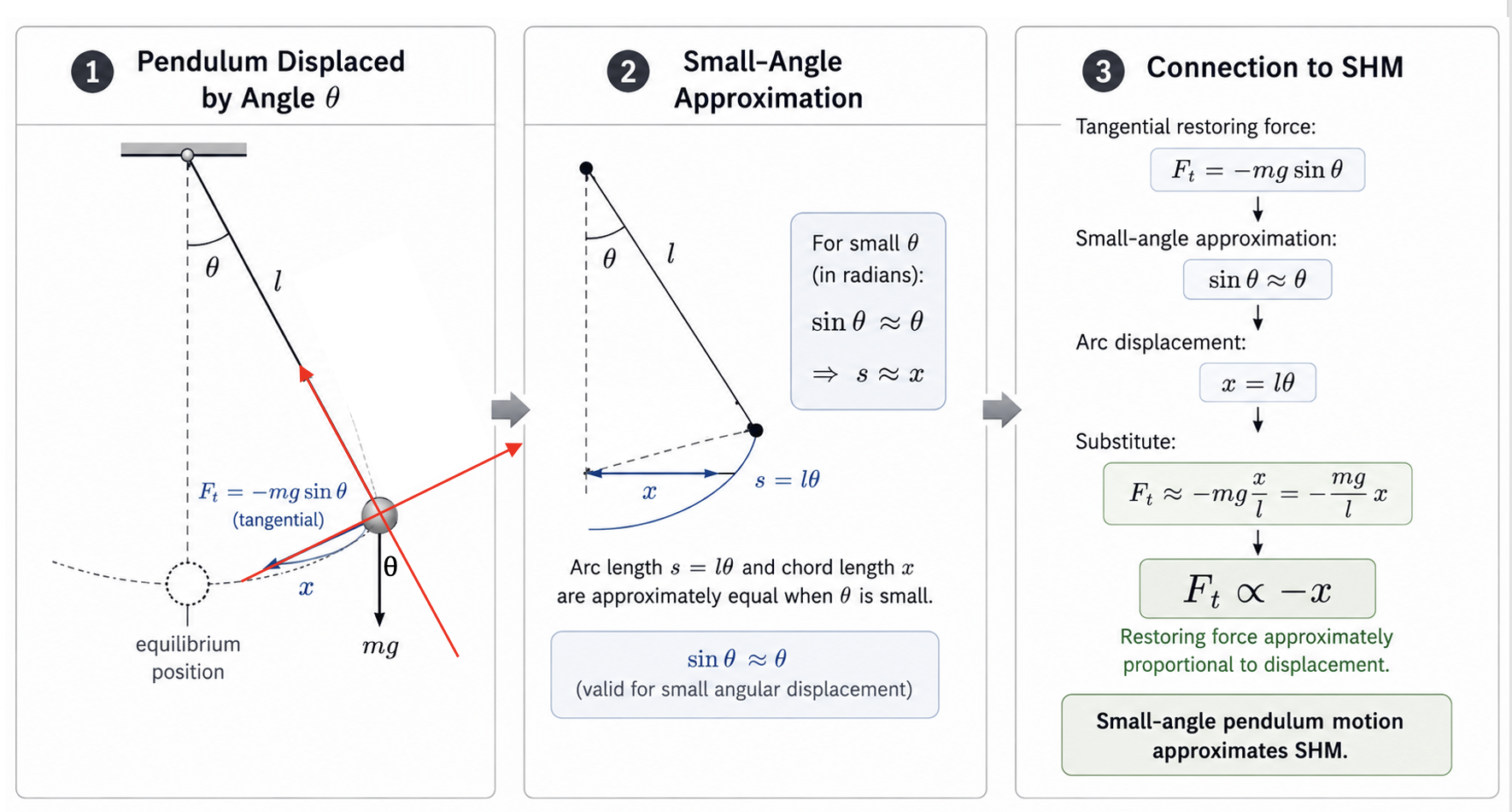 For small angular displacement, the pendulum restoring force becomes approximately proportional to displacement from equilibrium.
For small angular displacement, the pendulum restoring force becomes approximately proportional to displacement from equilibrium.
For a simple pendulum, the tangential restoring force is:
For small angular displacement:
and with arc displacement , this becomes:
where .
For small angles, the arc displacement and the corresponding linear displacement from equilibrium are nearly the same in magnitude, so the restoring force is approximately proportional to displacement.
So the restoring force is approximately proportional to displacement, which is why small-angle pendulum motion approximates SHM.
Simple Pendulum
For small angular displacement:
Then pendulum motion approximates SHM. The angular frequency is:
and the period is:
where is the pendulum length and is gravitational field strength. The ideal small-angle period is independent of mass.
The simple pendulum formula depends on the small-angle approximation.
See Pendulum Motion.
Floating Partially Immersed Object
A floating object like a cylinder can also oscillate vertically if displaced slightly and released. At equilibrium, upthrust equals weight. Let the y-position of the center of mass to be
If the object is pushed down by a small distance , the immersed volume increases, so the upthrust increases. The extra upthrust acts upward, opposite to the downward displacement.
The extra upthrust for a cylindrical rod with a cross area of is the resultant force:
where is the liquid density. Hence, it can be written in a form:
with . This is again of SHM form:
with . So a floating, partially immersed object executes SHM for small vertical displacements, provided the cross-sectional area stays effectively constant over the motion.
Damped and Forced Oscillations
Real systems lose energy due to friction, air resistance, internal resistance, or other dissipative effects. Damping causes:
- amplitude to decrease with time;
- total energy to decrease;
- oscillations to eventually stop unless energy is supplied.
Light damping allows oscillations to continue with decreasing amplitude. Critical damping returns the system to equilibrium in the shortest time without oscillation. Heavy damping gives slow non-oscillatory return.
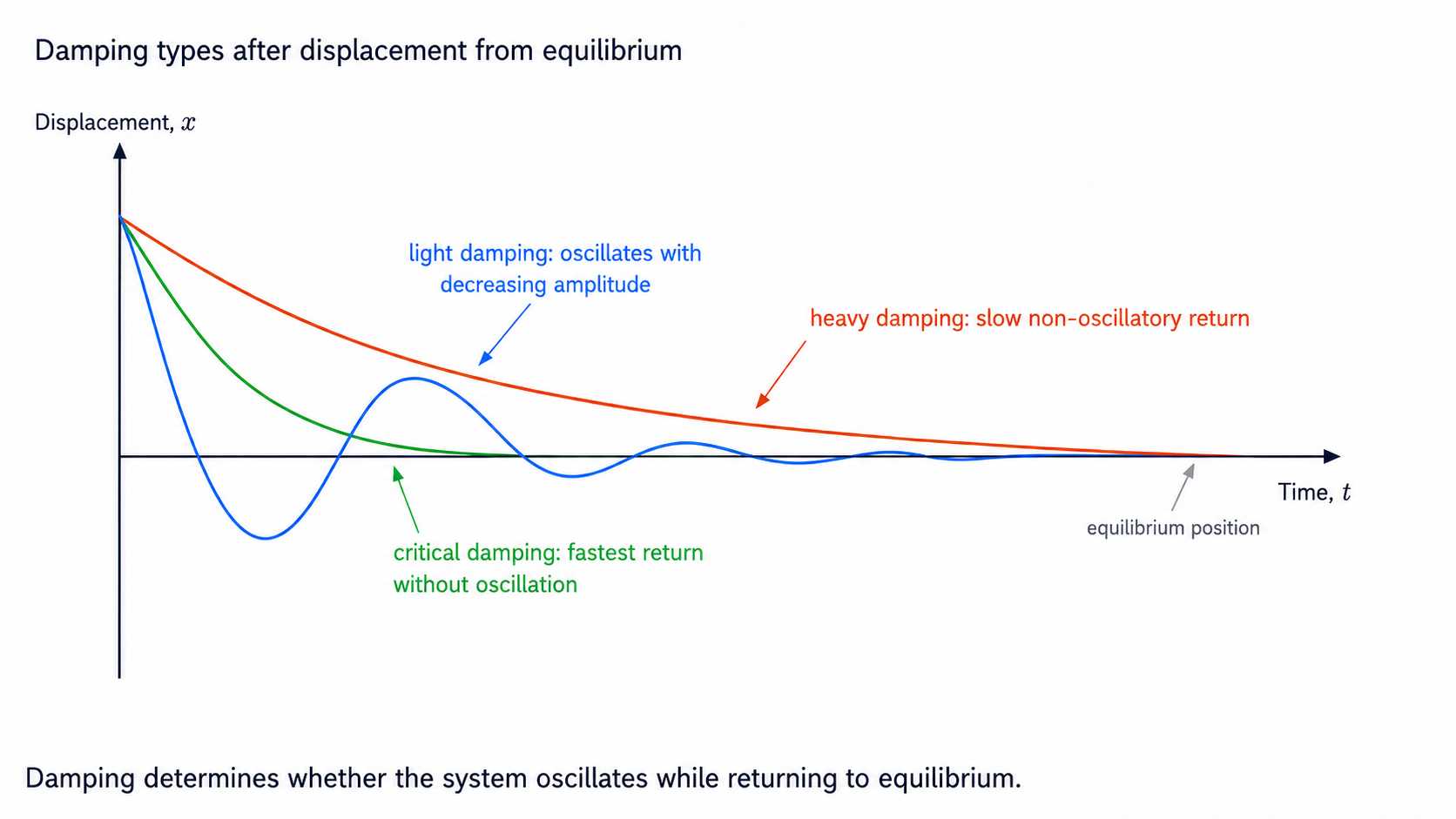 Damping determines whether the system oscillates while returning to equilibrium.
Damping determines whether the system oscillates while returning to equilibrium.
If a periodic external force acts on a system in one dimension:
where is the driving angular frequency. The system undergoes forced oscillation. At steady state, it oscillates at the driving frequency.
Resonance occurs when the driving frequency is close to the natural frequency:
Greater damping causes a lower, broader resonance peak. See Damping and Resonance.
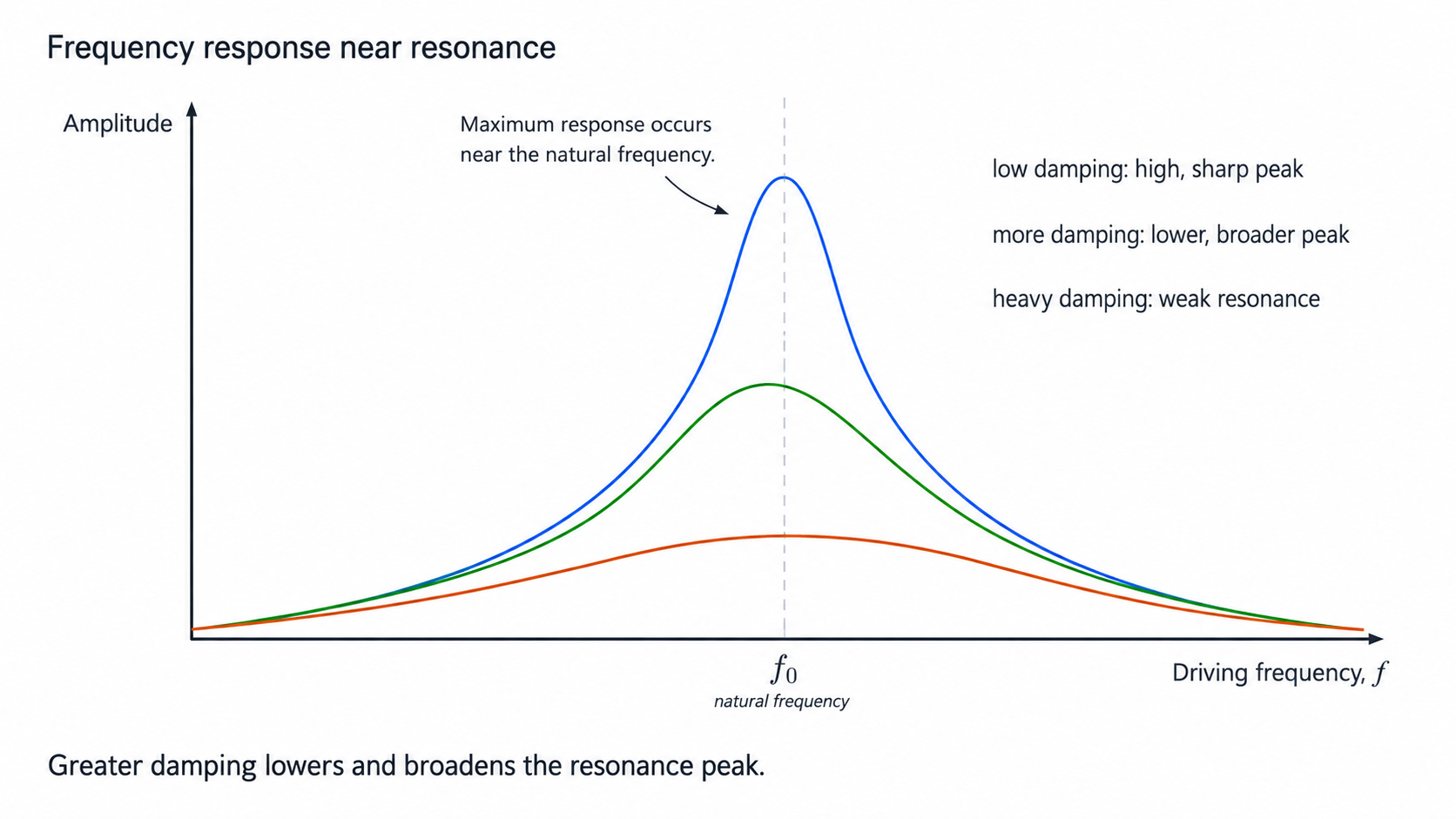 Greater damping lowers and broadens the resonance peak.
Greater damping lowers and broadens the resonance peak.
Circular Motion Connection
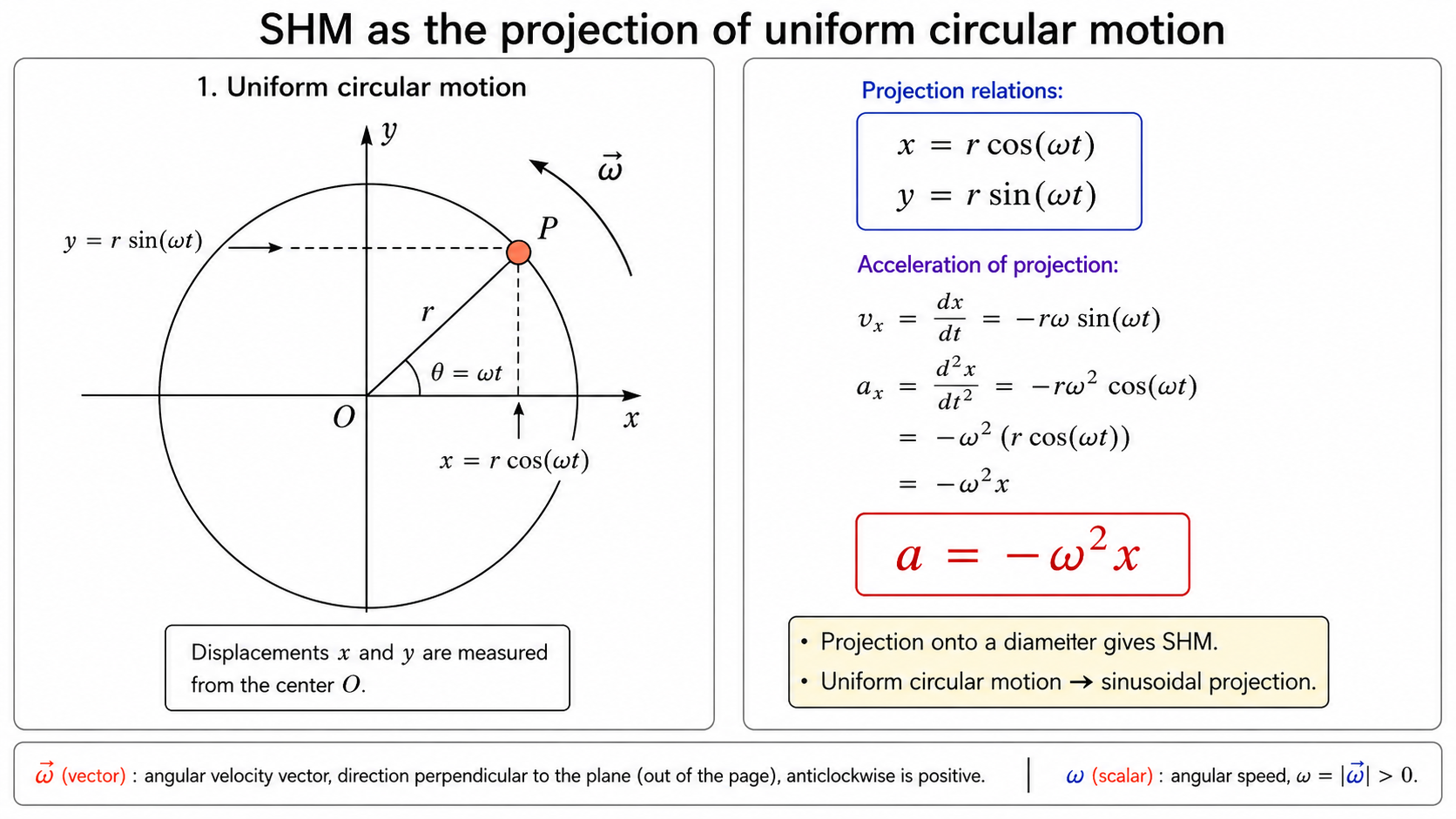 The projections of uniform circular motion on the coordinate axes are sinusoidal and therefore execute SHM.
The projections of uniform circular motion on the coordinate axes are sinusoidal and therefore execute SHM.
The projection of uniform circular motion onto a diameter gives SHM. If a particle moves in a circle of radius with angular velocity vector (conventionally anti-clockwise to be positive), its angular speed is . Then the projections on the coordinate axes are:
So SHM can be viewed as the one-dimensional projection of uniform circular motion onto either the - or -axis.
Problem-Solving Checklist
If given period:
If given amplitude and position:
If asked whether motion is SHM, check whether:
or in one-dimensional signed form:
If energy is involved:
Exam Relevance
Common exam tasks include:
- stating the SHM definition and explaining the negative sign;
- using in one-dimensional signed problems;
- interpreting -, -, -, -, and energy graphs;
- deriving or ;
- explaining why a pendulum formula requires small angles;
- comparing damping types;
- explaining resonance curves and practical resonance examples.
Common mistakes:
- forgetting the negative sign in ;
- confusing amplitude with instantaneous displacement;
- using the pendulum formula for large angles;
- forgetting velocity is zero at turning points;
- assuming resonance is always beneficial.
Summary
| Quantity | Expression |
|---|---|
| Frequency | |
| Angular frequency | |
| SHM condition | |
| Displacement | |
| Velocity | |
| Max speed | |
| Max acceleration | |
| Total energy | |
| Spring period | |
| Pendulum period |
Links
- Prerequisite: Kinematics
- Prerequisite: Forces
- Prerequisite: Work, Energy and Power
- Related: Circular Motion
- Related: Waves
- Concept: Simple Harmonic Motion
- Concept: Damping and Resonance
- Concept: Pendulum Motion
- Concept: Phase Difference
Provenance
- source file: 1_PDFsam_08_Oscillations.pdf
- generated by:
bridging_tools/ingest_JC_phy_wiki.py - manifest entry:
inbox/lecture_notes/1_PDFsam_08_Oscillations.pdf - source hash:
b21f19dd5702c1868bffa66ed50a27d4edbf80149c2c5b2daeafc268d642185c